
The home and small business routers these days that us geeks would be interested in buying are shipping with SNMP server functionality built in as …
Category: Raspberry PI

So at PingBin we have decided to start doing a weekly round up of the great Raspberry Pi projects, the plan is to have one …
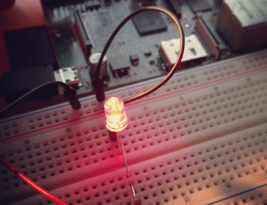
In this post I will take you through the fairly simple task of getting your Raspberry PI to control an LED via the GPIO interface, …
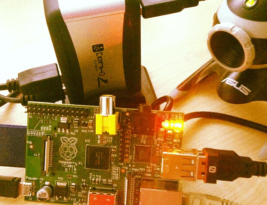
The Raspberry PI is perfectly equipped to turn your USB based webcam into a fully functional IP webcam that you can have lots of fun …
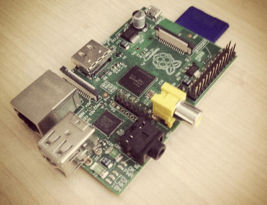
The Raspberry Pi has many great features straight out of the box, unfortunately WiFi is not one of them, in this guide I’ll show you how …